
دوره آموزش کنترل PID در صنعت و مثال در 6 نرم افزار
دوره آموزش کنترل PID – آموزش PID CONTROL
امروزه کارکردن با سیستمهای کنترل و ابزاردقیق و کنترل فرایند در صنعت امری مهم بوده که هر کارشناس کنترل و ابزاردقیقی باید آشنایی کافی با روشهای مختلف کنترل در صنعت از جمله کنترل PID و کنترل CASCADE و FeedForward و … را داشته باشد.
بتواند پروسه مورد نظر را تحلیل نموده در بهترین حالت ممکن ضرایب داده و پروسه مورد نظر را که میتواند دما , فشار , فلو , غلظت , سرعت وییا موقعیت باشد را کنترل نماید.
سرفصل های اصلی این دوره :
- معرفی PID Controller و انواع روشهای کنترل در صنعت از جمله OPEN LOOP-CASCADE-FEED FORWARD و… در صنعت.
- آموزش مبانی و اصول و موارد استفاده PID Controller
- نحوه و آموزش تنظیم ضرایب PID برای فرایندهای مختلف
- آموزش برنامه نویسی PID Controller در نرم افزار SIMATIC MANAGER
- آموزش برنامه نویسی PID Controller در نرم افزار PLC DELTA- ISP SOFT
- آموزش برنامه نویسی PID Controller در نرم افزار TIA PORTAL زیمنس
- آموزش برنامه نویسی PID Controller در نرم افزار FESTO FLUIDSIM
- آموزش برنامه نویسی PID Controller در نرم افزار LOGO COMFORT زیمنس
- آموزش Control PID فرایند دما
- و…
نمونه ای از آموزش.
توضیح PIC Controller در ویکی پدیا
کنترل خودکار
برای خلاص شدن اپراتور از کار خستهکننده کنترل دستی، باید حلقه کنترل را خودکار کنیم. این کار به صورت زیر قابل انجام است:
- نصب یک دستگاه اندازهگیری دمای الکترونیکی
- خودکار کردن شیر گاز با اضافه کردن یک محرک یا فعالگر (و شاید یک گیره تنظیم وضعیت)
- تعبیه یک کنترل کننده (مثلاً PID) و اتصال آن به یک دستگاه اندازهگیری دمای الکترونیکی و شیر کنترل خودکار
کنترل کننده تناسبی-انتگرالی-مشتقی (Proportional–Integral–Derivative Controller) یک نقطه تنظیم (Set Point) یا SP دارد که اپراتور میتواند آن را روی دمای مطلوب تنظیم کند.
خروجی کنترل کننده (Controller’s Output) یا CO موقعیت شیر کنترل را تنظیم میکند. و در نهایت، دستگاه اندازهگیری دما، که متغیر فرایند (Process Variable) یا PV نامیده میشود، فیدبک لازم را به کنترل کننده میدهد.
متغیر فرایند و خروجی کنترل کننده معمولاً با سیگنالهای ۴ تا 20 میلیآمپری یا فرمانهای دیجیتال روی یک فیلدباس منتقل میشوند.
وقتی همه اجزا در جای خود قرار گیرند، کنترل کننده PID متغیر فرایند را با نقطه تنظیم مقایسه کرده و اختلاف بین دو سیگنال را محاسبه میکند که خطا (Error) یا E نامیده میشود.
سپس، بر اساس خطا و ثابتهای تنظیم کنترل کننده PID، کنترل کننده یک خروجی مناسب را محاسبه کرده و برای نگه داشتن دما در نقطه تنظیم، شیر را میچرخاند.
اگر لازم باشد دما به بالاتر از مقدار نقطه تنظیم تغییر کند، کنترل کننده موقعیت شیر را در جهت عکس تغییر میدهد و بالعکس.

مدهای کنترلی
کنترل کنندههای PID سه مُد کنترلی دارند:
- کنترل تناسبی (Proportional Control)
- کنترل انتگرالی (Integral Control)
- کنترل مشتقی (Derivative Control)
هر یک از این سه مد، واکنش متفاوتی نسبت به خطا دارند. مقدار پاسخ تولیدی هر مد کنترلی را میتوان با تغییر تنظیمات کنترل کننده سامان داد. در ادامه، هر یک از این مدها را توضیح میدهیم.
مد کنترل تناسبی
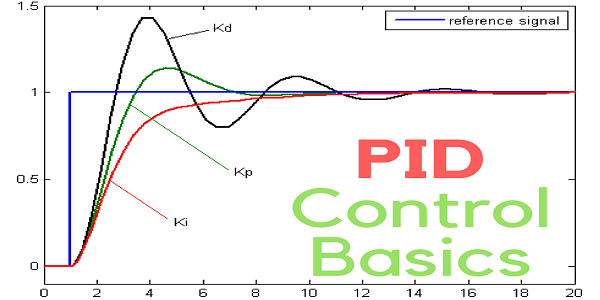
مد کنترل تناسبی، در اغلب موارد نیروی محرک کنترل کننده است. این مد، خروجی کنترل کننده را متناسب با مقدار خطا تغییر میدهد (شکل ۴). اگر خطا بزرگ شود، عمل یا کنش کنترلی نیز بزرگتر میشود.
پارامتر قابل تنظیم کنترل تناسبی، بهره کنترل کننده (Controller Gain) یا KcKc نامیده میشود. هرچه بهره کنترل کننده بزرگتر باشد، عمل کنترل تناسبیِ خطا را افزایش میدهد.
اگر بهره کنترل کننده در مقدار بسیار بالایی تنظیم شود، حلقه کنترل شروع به نوسان میکند و ناپایدار میشود. از سوی دیگر، اگر بهره بسیار کم باشد، پاسخ به اغتشاشات یا تغییرات نقطه تنظیم، به اندازه کافی کارساز نخواهد بود.
P=KC×EP=KC×E
تنظیم بهره کنترل کننده، بر مدهای کنترل انتگرالی و مشتقی نیز تأثیر میگذارد. به همین دلیل است که این پارامتر را بهره کنترل کننده مینامیم، نه بهره تناسبی.
در حالی که اغلب کنترل کنندهها از بهره کنترل کننده (KcKc) به عنوان تنظیم تناسبی استفاده میکنند، برخی کنترل کنندهها از باند تناسبی (Proportional Band) یا PB بهره میبرند که بر حسب درصد بیان میشود.

مد کنترل انتگرالی
لزوم بازنشانی دستی، منجر به توسعه بازنشانی خودکار یا مد کنترل انتگرالی شده است. وقتی خطا وجود داشته باشد (متغیر فرایند در نقطه تنظیم نباشد)، مد کنترل انتگرالی خروجی کنترل کننده را به صورت پیوسته کم یا زیاد میکند تا خطا را به صفر کاهش دهد.
اگر خطا بزرگ باشد، مد انتگرالی خروجی کنترل کننده را به سرعت افزایش یا کاهش میدهد و اگر خطا کوچک باشد، تغییرات آرامتر رخ خواهد داد.
برای یک خطای مشخص، سرعت عمل انتگرالی با زمان تنظیم کنترل کننده انتگرالی (TITI) سامان داده میشود. مقدار بزرگ TITI، موجب عمل انتگرالی کند میشود و مقدار کوچک TITI، به عمل انتگرالی سریع میانجامد (شکل ۵). اگر زمان انتگرال بسیار بزرگ باشد.
کنترل کننده بسیار کند خواهد بود و در صورتی که بسیار کوچک باشد، حلقه کنترل نوسانی و ناپایدار خواهد شد. در شکل ۵، TSTS بازه اجرای الگوریتم کنترل است که گاهی زمان نمونهبرداری یا زمان اسکن نیز نامیده میشود.
I=Iprevious+KC×E×TsTII=Iprevious+KC×E×TsTI
معادله یک کنترل کننده فقط انتگرالی به صورت زیر است:
CO=KC(1TI∫Edt)CO=KC(1TI∫Edt)
مد کنترل مشتقی
سومین مد کنترلی در یک کنترل کننده PID، مشتق است. کنترل مشتقی به ندرت در کنترل فرایندها مورد استفاده قرار میگیرد، اما در کنترل حرکت از آن استفاده بیشتری میشود.
این نوع کنترل کننده در کنترل فرایند نسبت به نویز اندازهگیری بسیار حساس است و تنظیم با استفاده از سعی و خطا را دشوارتر میکند. با وجود این، استفاده از مد کنترل مشتق یک کنترل کننده، پاسخ حلقه کنترل را نسبت به مد کنترل PI که در ادامه بیان میکنیم، اندکی افزایش میدهد.
مد کنترل مشتقی، یک خروجی را بر اساس میزان تغییرات خطا (شکل ۶) تولید میکند. وقتی تغییرات خطا زیاد باشد، مد مشتقی عمل کنترل بیشتری تولید خواهد کرد. وقتی خطا تغییر نکند، عمل مشتقی صفر خواهد بود.
مد مشتقی یک تنظیمات قابل تغییر دارد که زمان مشتق (TDTD) نامیده میشود. هر چه زمان مشتق بیشتر باشد، عمل حاصل از مشتق بیشتری تولید خواهد شد. وقتی زمان مشتق بسیار طولانی باشد، نوسانهایی رخ میدهد و حلقه کنترل ناپایدار خواهد شد.
D=Kc×TDTS×(Eprevious–Enow)D=Kc×TDTS×(Eprevious–Enow)
دو واحد اندازهگیری مورد استفاده در تنظیمات مشتقگیر یک کنترل کننده دقیقه و ثانیه هستند.
کنترل کننده تناسبی
درک و تنظیم کنترل کنندههای تناسبی (Proportional Controller) یا P، آسان است. خروجی کنترل کننده به سادگی برابر با مجموع خروجی مد کنترل تناسبی و یک بایاس است. بایاس باید به گونهای باشد که وقتی خطا وجود ندارد، کنترل کننده بتواند خروجی را در مقدار 50 درصد نگه دارد.
CO=(KC×E)+BiasCO=(KC×E)+Bias
استفاده از کنترل کننده تناسبی به تنهایی، یک عیب بزرگ دارد و آن، آفست (Offset) است. آفست، یک خطای پایدار است که نمیتوان به تنهایی با کنترل تناسبی آن را از بین برد.
برای مثال، کنترل سطح آب یک مخزن را در نظر بگیرید که در شکل ۸ نشان داده شده و یک کنترل کننده تناسبی دارد. تا زمانی که جریان آب مخزن ثابت بماند، سطح آب در نقطه تنظیم باقی میماند.
اگر اپراتور جریان خروجی آب را افزایش دهد، به دلیل عدم تعادل بین جریان آب ورودی و خروجی، سطح آب مخزن کاهش پیدا میکند. وقتی سطح آب کم میشود، خطا افزایش مییابد و کنترل کننده تناسبی، خروجی کنترل کننده را متناسب با این خطا زیاد میکند.
در نتیجه، شیری که جریان آب ورودی به مخزن را کنترل میکند، بیشتر باز شده و آب بیشتری وارد مخزن میشود.
اگر کاهش سطح آب مخزن به صورت پیوسته ادامه پیدا کند، شیر ورودی آب نیز به صورت پیوسته باز خواهد شد تا زمانی که جریان ورودی و خروجی آب مخزن برابر شوند.
در این نقطه، سطح مخزن (و خطا) ثابت میماند. از آنجایی که خطا ثابت میماند، خروجی کنترل کننده P ثابت بوده و موقعیت شیر را ثابت نگه میدارد. اکنون سیستم در حالت تعادل قرار دارد، اما سطح مخزن، پایینتر از نقطه تنظیم آن است. این مقدار خطای پایدار باقیمانده، آفست نامیده میشود.
شکل ۹، پاسخ کنترل کننده تناسبی و اثر کاهش ناگهانی فشار سوخت گاز هیتر را نشان میدهد که قبلاً درباره آن بحث کردیم. کاهش فشار گاز، میزان آتش و در نتیجه دمای خروجی هیتر را کاهش میدهد.
این امر موجب خطا در پاسخ کنترل کننده میشود. البته یک نقطه تعادل جدید بین عمل کنترلی و خطا به وجود میآید و آفست دما با کنترل کننده تناسبی از بین نخواهد رفت.
در آموزش ارائه شده که به زبان فارسی می باشد میتوانید با انواع روشهای کنترل در صنعت آشنا شوید و در چند نرم افزار مختلف نیز روش استفاده از کنترل PID و تنظیم ضرایب را فرا بگیربد.
.http://ALLAUTOMATION.IR https://en.wikipedia.org/wiki/PID_controller
با تشکر








چطوری میتونم دوره را تهیه کنم ؟؟؟
با سلام و احترام
آموزش ها به صورت دانلودی هستند لطفا به سبد خرید اضافه کنید و نحوه پرداخت اینترنتی یا کارت به کارت را انتخاب کنید اگر قبل از خرید عضو سایت شوید پس از خرید در پنل کاربری به لینک دانلود دسترسی خواهید داشت در غیر اینصورت از طریق درگاه های ارتباطی جهت دریافت لینک دانلود با ما در تماس باشید.
سلام وقت بخیر لطفا واتساپ پیام بزارید تا خدمتتون ارسال بشه.
متشکرم